Preparing usage notes, please check back later
Get the full experience in the app
Learn anywhere with detailed sentence and usage analysis
01:03
She took a brave step forward, leaving behind her comfort zone to chase her dreams.
Vocabulary
- brave
adj. Having courage
- comfort zone
phr. A familiar situation where one feels safe
Explanation
a brave step is a noun phrase, where brave is an adjective modifying the noun step, meaning "a courageous step".
forward is an adverb modifying step, meaning "ahead".
The whole phrase serves as the object, answering the "what" of took (verb) — she took a brave step forward.
Get the full experience in the app
Look up words anytime with pronunciation, part of speech, and usage
brave
US/brev/
UK/breɪv/
adj.Brave
v.t.To bravely face
A2 Elementary
Get the full experience in the app
Practice speaking anytime and get instant pronunciation feedback
Try this speaking exercise.
Try practicing with this sentence.
80
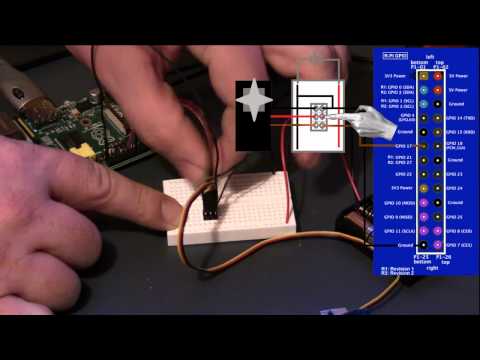
Servo control using Raspberry Pi.
0
Sea Monster posted on 2015/03/01Ever wanted to make your Raspberry Pi control something physical? This awesome tutorial walks you through servo control step-by-step, covering everything from GPIO wiring to sending the right PWM signals! You'll pick up some super useful technical vocabulary along the way, making it a fantastic way to boost your knowledge and your English skills!
Learn this video on the APP!
The VoiceTube App has more in-depth practice for videos!